Maintenant que nous avons des outils d'analyse complexe, comment les appliquer à notre sphère ? Le rôle central dans la réponse que je vais vous fournir ce sera celui de la projection stéréographique. Il faut la penser comme un pont entre les nombres complexes et la sphère $\mathbf{S}^2$.
Cette projection doit servir à :
- préserver les propriétés de la sphère (compacité par exemple) ;
- tranposer la notion d'holomorphie pour pouvoir faire du calcul (intégration par exemple).
Rien qu'avec ces deux conditions on se sait que notre projection devra respecter les faits suivants :
- c'est une bijection et même un homéomorphisme (pour préserver les propriétés topologiques) ;
- comme $\mathbf{C}$ n'est pas compact mais la sphère l'est, il faudra faire un découpage de la sphère (ce découpage se fera en deux morceaux que l'on appellera « cartes ») ;1
- le passage d'un morceau à l'autre (on verra dans le découpage que les morceaux se chevauchent), doit se faire de manière régulière pour garder un calcul différentiel possible (sinon vous auriez une fonction qui serait holomorphe, ou non, en dépendance du morceau utilisé pour le domaine et du morceau utilisé pour le codomaine (l'ensemble des images)).
Cela fait beaucoup de travail. La première étape est d'obtenir un homéomorphisme, c'est ce dont traite ce chapitre. Il faudra attendre le chapitre suivant pour s'intéresser aux propriétés de régularité.
-
La suite $(n)_{n\in\mathbf{N}}$ n'admet pas de sous-suite convergente dans $\mathbf{C}$ donc ce dernier n'a pas la propriété de compacité. Pourtant, la sphère $\mathbf{S}^2$ est compacte (puisque c'est un fermé borné de $\mathbf{R}^3$). Comme l'image d'un homéomorphisme respecte la compacité (l'image par une application continue d'un compact est encore compacte) il faut soit rendre la sphère non compacte en la découpant, soit rendre $\mathbf{C}$ compact. La première option est plus facile à manier par la suite pour se donner des outils de calcul différentiel mais la seconde option est topologiquement très intéressante : c'est la compactification d'Alexandrov. On utilisera donc les deux en gardant en tête les « avantages » respectifs : analytiques pour la première et topologiques pour la seconde. ↩
- Identification de $\mathbf{S}^2$ à $\hat{\mathbf{C}}$
- La compactification de $\mathbf{C}$ en $\hat{\mathbf{C}}$
Identification de $\mathbf{S}^2$ à $\hat{\mathbf{C}}$
La partie cruciale de ce tutoriel est ici. Il va s'agir d'identifier proprement deux objets a priori distincts. Nous commencerons par poser $\hat{\mathbf{C}}$ de telle sorte que la sphère $\mathbf{S}^2$ soit en bijection avec cet objet, puis nous justifierons le fait que cette bijection est en fait un homéomorphisme.
La sphère $\mathbf{S}^2$
Définition classique
La sphère $\newcommand{bS}{\mathbf{S}}\bS^2$ est l'ensemble suivant :
Il s'agit donc bien de la paroi de ce qu'on appelle dans le langage courant la « sphère ». En particulier, elle est centrée en $0$ et est de rayon égal à $1$.
Topologie usuelle de la sphère
Par la suite nous mettrons en évidence un homéomorphisme entre la sphère $\bS^2$ et la sphère de Riemann, $\hat{\mathbf{C}}$. Mais pour justifier des propriétés de continuité, il faut munir $\bS^2$ d'une topologie, c'est-à-dire d'un ensemble de parties de $\bS^2$ que nous appellerons les ouverts de la sphère $\bS^2$ et qui respectent certains axiomes (permettant d'appeler alors cet ensemble d'ouverts une topologie).
Nous allons donner la topologie la plus évidente de $\bS^2$ : la topologie induite de $\R^3$ sur $\bS^2$. Nous définirons cette topologie par son système de voisinages et non par les ouverts. Cela est plus simple à définir et parfaitement équivalent. Pour rappel, un ensemble est un ouvert s'il est voisinage de chacun de ses points. Si ces notions vous paraissent floues, il peut être bon de revenir au chapitre précédent.
Voisinages de $\R^3$
De manière très analogue à la topologie de $\mathbf{C}$, un voisinage de $a\in\R^3$ est un ensemble $W_a$ contenant une boule ouverte centrée en $a$ et de rayon strictement positif :
où $\|x-a\|_2$ est la norme euclidienne de $x-a$. Si $(u_1,u_2,u_3) = x-a$ alors ce nombre est défini par :
En d'autres termes, $\|x-a\|_2$ est la distance euclidienne entre $x$ et $a$ (c'est-à-dire la longueur du segment reliant $x$ et $a$).
Voisinages de $\bS^2$
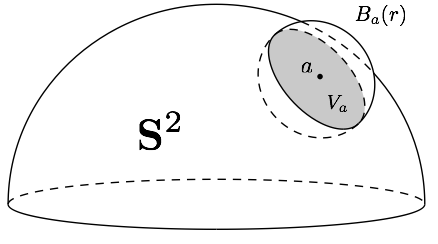
Soit $a\in \bS^2$ un point de la sphère. Un voisinage $V_a$ de la sphère du point $a$ est une intersection :
où $W_a$ est un voisinage de $a\in \R^3$ (c'est-à-dire un voisinage de $a$ dans l'espace $\R^3$).
Il est important de noter que la notion de voisinage de $a$ dépend fortement de l'espace choisi. On vient de définir le voisinage de $a$ lorsqu'on regarde la sphère $\bS^2$ en utilisant les voisinages de $a$ dans l'espace euclidien $\R^3$.
Sur l'image qui suit, la zone grisée représente un voisinage, $V_a$, de $a$ qui est un point de la sphère $\bS^2$ dont on a gardé qu'un seul hémisphère. Dans cette image, $B_a(r)$ joue le rôle de $W_a$.
Projection stéréographique
Considérons $N$ le pôle nord de $\bS^2$, c'est-à-dire le point $(0,0,1)$ de $\R^3$. Il va s'agir de construire la projection stéréographique de pôle $N$, que l'on notera $P_N$.
L'image de $\bS^2-\{N\}$ par la projection sera $\mathbf{C}$ et l'on identifiera $P_N(N)$ à $\infty$ ce qui nous donnera une application :
On appelle $\newcommand{iC}{\hat{\mathbf{C}}}\iC = \mathbf{C}\cup\{\infty\}$ la sphère de Riemann pour des raisons qui vous sembleront évidentes par la suite.
Première étape
On va commencer par les points différents de $N$. Cette construction est très géométrique. Pour un point $p$ de la sphère donné, on va choisir l'intersection de la droite $(Np)$ avec le plan $z=0$ ; comme le montre cette image :
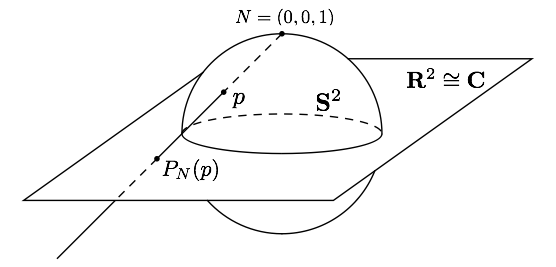
Une fois l'image par cette projection trouvée, il suffit de l'identifier à un point de la droite complexe. Ce qui est très naturel vu que c'est le point d'un plan euclidien.
Donnons l'expression analytique de cette projection. Soit $p = (x,y,z)\in \bS^2$ différent de $N$.
Vous pouvez vérifier que cette valeur correspond bien à la construction donnée.
De plus, comme la définition de $P_N(p)$ est univoquement définie par $p$, on peut donner la transformation inverse. Soit $u = x + \ii y$ avec $x,y$ réel, alors :
Deuxième étape
On pose $P_N(N) = \infty$ et $P_N^{-1}(\infty) = N$.
On peut se demander si un tel choix est cohérent. Remarquez tout d'abord que si un point $p\neq N$ de la sphère est très proche de $N$, alors son image par la projection sera de module très grand. En effet, calculons
on remarque que $z$ vérifie la propriété descriptive de $\bS^2$ : $z^2 = 1- x^2-y^2$ et donc
le développement limité à l'ordre $1$ en $0$ de $\sqrt{1+h}$ étant $1+h/2 +o(h)$ on obtient :
Aparté
Vous remarquerez sans doute que la problématique de faire correspondre une sphère à un plan vous est un peu familière. En fait il s'agit de la même problématique que celle rencontrée par les géographes lorsqu'il s'agit de représenter sur une carte la Terre.
La méthode présentée ici n'est pas la plus utilisée. Elle a le net avantage d'être conforme : elle respecte les angles. En revanche, les longueurs sont très déformées (un petit segment prêt de $N$ sera beaucoup plus grand que le même segment mais au pôle sud).
Vous pouvez vous demander s'il existe une méthode permettant de vraiment dessiner la sphère dans un plan ; c'est-à-dire dans nos termes, avoir un homéomorphisme de $\bS^2$ dans $\mathbf{C}$ et non dans $\iC$. La réponse à cette question est non. Pour une raison topologique assez simple : la sphère est compacte et le plan ne l'est pas.
Regardez sur l'image qui suit, ce que donnerait la projection stéréographique de la Terre de pôle Nord (le vrai, cette fois-ci) :

La compactification de $\mathbf{C}$ en $\hat{\mathbf{C}}$
La vraie histoire en version courte
Le fait d'adjoindre le point à l'infini, $\infty$, à $\mathbf{C}$ n'est pas un acte anodin.
Il y a une construction précise permettant de dire que $\newcommand{iC}{\hat{\mathbf{C}}}\newcommand{bS}{\mathbf{S}}\iC$ est en fait un espace compact, le plus petit espace compact contenant $\mathbf{C}$. Le lecteur intéressé pourra se référer à la compactification d'Alexandrov.
Un peu plus d'explications
Nous pouvons tout de même nous convaincre que $\iC$ ainsi construit donne bien lieu à un espace compact. Nous avons déjà une idée de la preuve montrant que $P_N$ est une bijection continue et de réciproque continue entre $\bS^2$ et $\iC$. Ainsi, tout raisonnement sur $\iC$ se ramène en fait à un raisonnement sur $\bS^2$.
On peut maintenant se focaliser sur la question de compacité. En fait c'est immédiat : puisque $\bS^2$ est fermé et borné dans $\R^3$, c'est un espace compact.
Ainsi, toute suite à valeurs dans $\iC$ admet une sous-suite convergente. Par exemple, la suite des entiers naturels, $(n)_{n\in \mathbf{N}}$, qui divergeait dans $\mathbf{C}$ converge maintenant vers $\infty$.
Géométriquement, on voit que la suite des antécédents :
converge vers $N$, c'est-à-dire l'antécédent du point à l'infini de $\iC$.
Explicitation de la topologie de $\iC$
En guise de conclusion, on va expliciter les ouverts de $\iC$.
Un ouvert de $\iC$, $U$ est :
- un ouvert de $\mathbf{C}$ si $U$ ne contient pas $\infty$ ;
- le complémentaire d'un compact de $\mathbf{C}$ dans le cas contraire.
Ce qu'il faudra retenir, c'est que $\mathbf{S}^2$ et $\hat{\mathbf{C}}$ sont les mêmes objets. Ainsi quand nous raisonnerons sur $\hat{\mathbf{C}}$ il faudra garder en tête qu'il s'agit d'un raisonnement sur $\mathbf{S}^2$ et réciproquement.
Cela donne donc deux points de vue très complémentaires sur un même objet. Dans la partie suivante, nous verrons pourquoi travailler sur les nombres complexes est si utile.